Ενημερώθηκε το έργο [εδώ] του πρόσθετου Mind+ για το αυτοκίνητο R4. Πλέον υπάρχουν blocks εντολών που υποστηρίζουν όλες τις κινήσεις του βραχίονα 3 βαθμών ελευθερίας του οχήματος.
Αντί της κλασικής βιβλιοθήκης Servo, έχω χρησιμοποιήσει την [VarSpeedServo] η οποία προσφέρει ομαλότερη κίνηση στα σέρβο. Μοναδική εκκρεμότητα παραμένει ο αισθητήρας υπερύθρων που λειτουργεί σε συνδυασμό με το τηλεχειριστήριο που υπάρχει στο κιτ.
Μερικές παρατηρήσεις σχετικά με το R4:
(0) Μέσα στο κιτ υπάρχουν μερικοί αισθητήρες διεπαφής RJ11 που δεν ξέρω ειλικρινά τι δουλειά έχουν μέσα στο κιτ, δεδομένου ότι το Arduino Uno αλλά και η πλακέτα οδήγησης των σέρβο, δεν διαθέτουν διεπαφές RJ11.
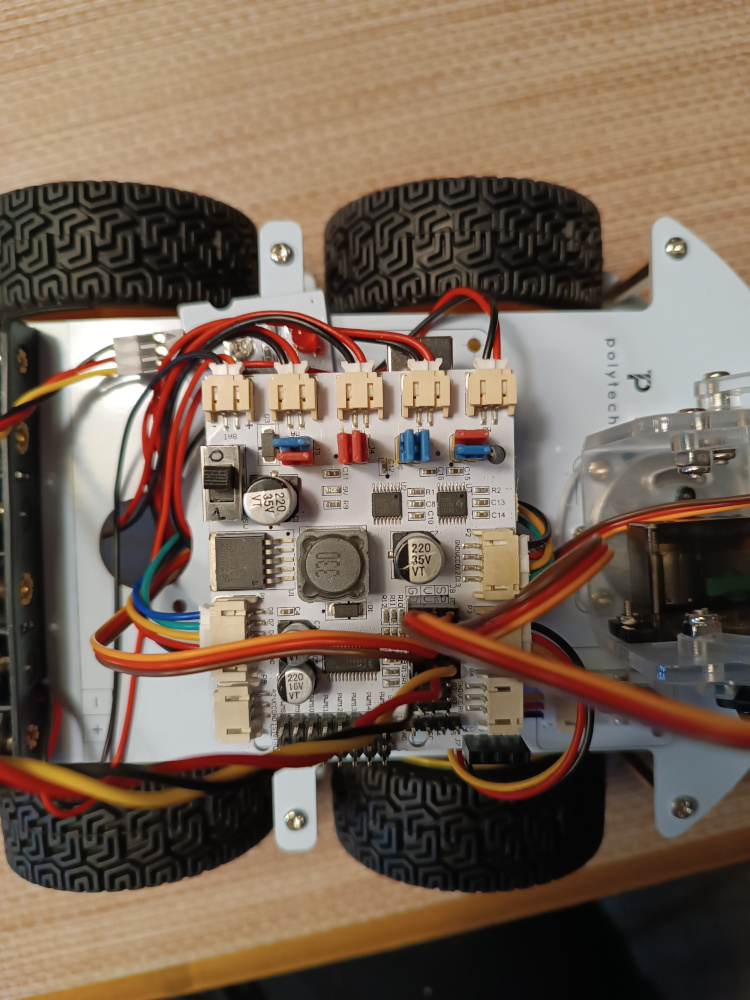
(1) Υπάρχει επίσης ένα κόκκινο led σε breakout board των 3 pins ενώ υπάρχουν και καλώδια 3 pin female – female. Αυτά τα καλώδια είναι πολύ χρήσιμα γιατί μπορούν να χρησιμοποιηθούν για συνδέσεις αισθητήρων και ενεργοποιητών των 3 pins (όπως το led που ανέφερα παραπάνω) πάνω στην πλακέτα οδήγησης των σέρβο. Απορώ μάλιστα γιατί στις οδηγίες συναρμολόγησης δεν έχουν χρησιμοποιήσει το κόκκινο led δεδομένου ότι το κιτ, εκτός των 4 κινητήρων, φωνάζει ότι χρειάζεται περισσότερους απλούς ενεργοποιητές (πχ το R2 του Δημοτικού έχει και ένα buzzer ενσωματωμένο στην πλακέτα του Arduino Uno που δεν υπάρχει στο R4). Έτσι λοιπόν σύνδεσα το κόκκινo led στην D5 και έχω προσθέσει στο σετ εντολών του πρόσθετου ένα block με το οποίο μπορεί να χρησιμοποιηθεί.
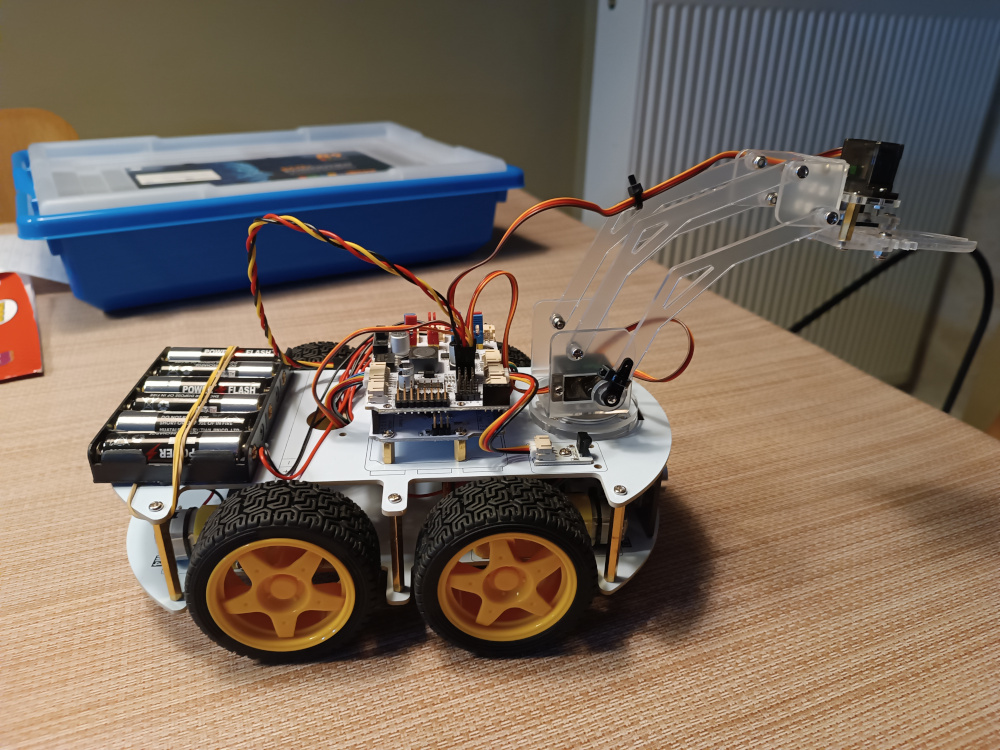
(2) Η συναρμολόγηση είναι σχετικά απλή. Το βασικό μέρος του αυτοκινήτου συναρμολογείται πανεύκολα ακόμη και από μαθητές Γυμνασίου. Λίγο μεγαλύτερη δυσκολία εμφανίζει, αναμενόμενα, η συναρμολόγηση του βραχίονα αλλά όχι κάτι το απαγορευτικό. Καμμία σχέση δηλαδή με το τέρας R3 που το έστειλαν μάλιστα στο Δημοτικό!
(3) Στο κιτ που συναρμολόγησα, η δαγκάνα είναι αναμφίβολα το πιο προβληματικό μέρος. Τα δύο “δόντια” δεν εφάπτονται (στα γρανάζια τους), με αποτέλεσμα ουσιαστικά να ανοίγει μόνο το ένα δόντι της δαγκάνας.
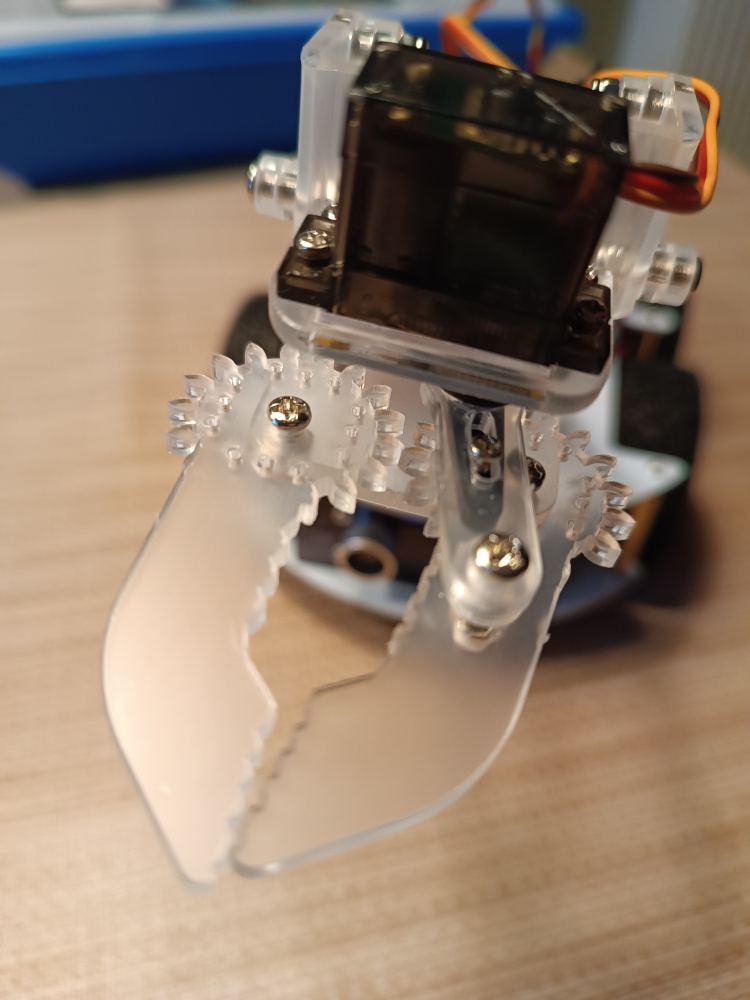
Το δεύτερο προβληματικό μέρος στη συναρμολόγηση, είναι η πλαστική στρόγγυλη βάση του σέρβο βάσης. Τα μικρά βιδάκια (διάτρησης) τα οποία υποτίθεται ότι “τρυπάνε” τα πλαστικά και τα συγκρατούν μαζί, σπάνε (!), όπως με είχε ενημερώσει ο καλός συνάδελφος Παντελής Πετρίδης που έχει συναρμολογήσει αρκετά R4 και γνωρίζει καλύτερα. Με λίγη κόλλα πάντως το πρόβλημα λύνεται.
(4) Το κιτ δεν πιστεύω ότι μπορεί να χρησιμοποιηθεί σε ρεαλιστικά σενάρια ως βραχίονας δαγκάνα, ίσως αν κάποιος σχεδιάσει και εκτυπώσει δύο “δόντια” δαγκάνας που να ταιριάζουν στη βάση και να εφάπτονται τα γρανάζια τους, να είναι πολύ καλύτερα τα πράγματα.
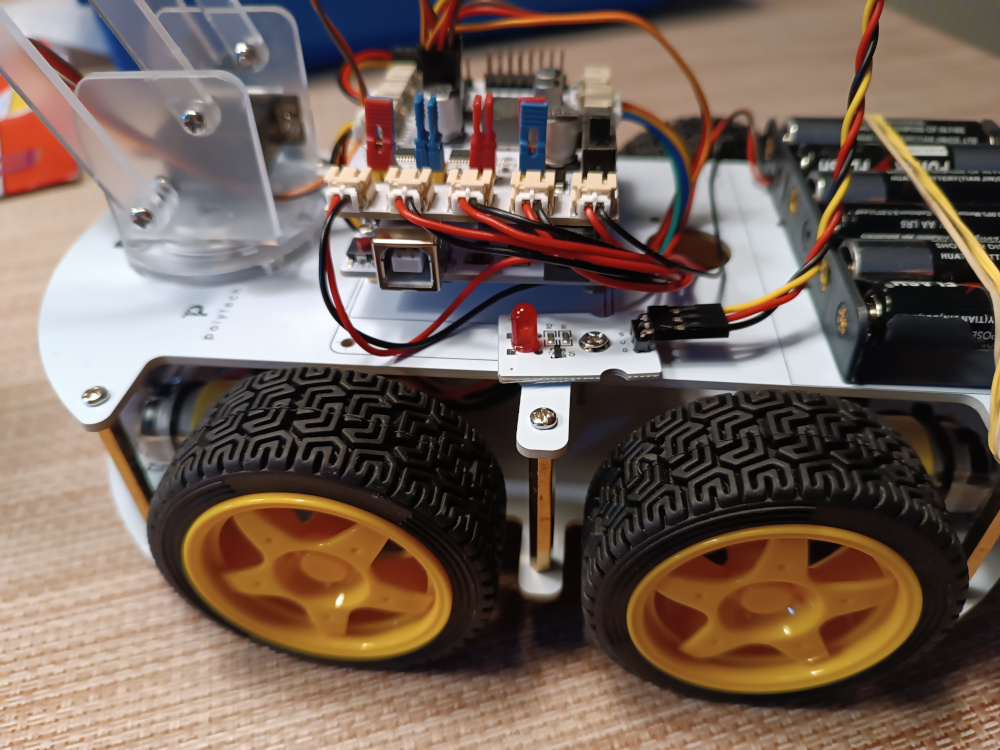
(5) Για σενάρια line – tracking, obstacle avoidance κλπ, το R4 είναι αξιοπρεπέστατο και αξίζει κατά τη γνώμη μου μεγαλύτερης προσοχής από τους μαθητές και τους συναδέλφους του Γυμνασίου. Το πρόβλημα και σε αυτό το κιτ, όπως και στο R2, είναι στις στροφές. Δεν υπάρχει τρόπος να στρίψει ακριβώς (πχ 90 μοίρες). Οπότε και σε αυτό το πρόσθετο, οι στροφές μετριούνται σε δευτερόλεπτα.
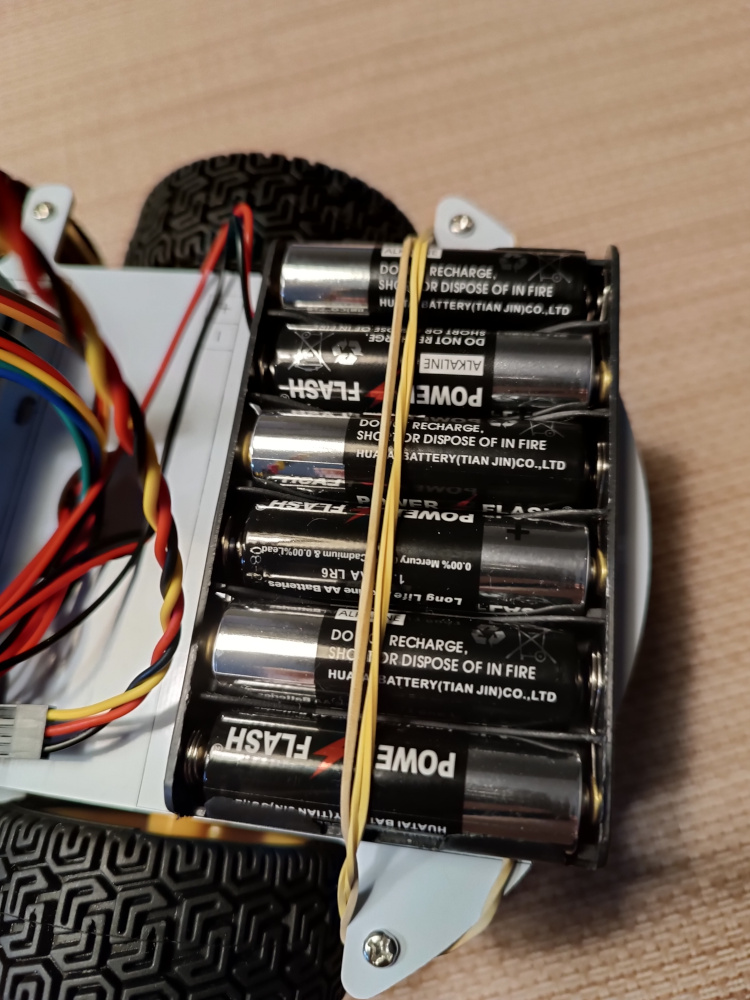
(6) Όπως είναι αναμενόμενο, δεν λειτουργεί τίποτα χωρίς τις 6 x AA μπαταρίες. Με 4 κινητήρες, 3 σέρβο, αισθητήρα απόστασης, τριπλό αισθητήρα αντανάκλασης και αισθητήρα υπερύρθων το κιτ χρειάζεται πολύ ενέργεια που μπορεί να τη βρει μόνο από τις μπαταρίες.

Το γράφω αυτό για να σημειώσω ότι το R2 λειτουργεί και με το καλώδιο – χωρίς μπαταρίες, αν και είναι λίγο νωχελικό – κάτι που έχει την αξία του στην οικονομία μιας ομάδας / ομίλου Ρομποτικής. Τέλος οι 2 βίδες για το μπαταριόκουτο είναι μεν στο σωστό σημείο για να μπορεί να βιδώνει πάνω στο σασί (σε αντίθεση με το R2 που το μπαταριόκουτο απλά δεν χωράει στον χώρο που θα έπρεπε να μπει), αλλά όταν μπουν (οι βίδες) οι ακριανές μπαταρίες είναι λίγο στον αέρο με αποτέλεσμα να μην γίνεται καλή επαφή και να μη δίνει ρεύμα. Έβγαλα τις βίδες, έβαλα ένα λαστιχάκι και το πρόβλημα λύθηκε (προσωρινά – μόνιμα).
Ευχαριστώ πολύ τους συναδέλφους Πληροφορικούς εδώ στα Γιαννιτσά που φρόντισαν μου δανείσουν ένα κιτ ώστε να ετοιμάσω το πρόσθετο.
Καλή διασκέδαση σε μαθητές και Πληροφορικούς Γυμνασίου.